In this week, some datasets were collected. However, first several problems about the GPS were solved. This problems are related to the complexity of the hardware and software developed and implemented in the vehicle.
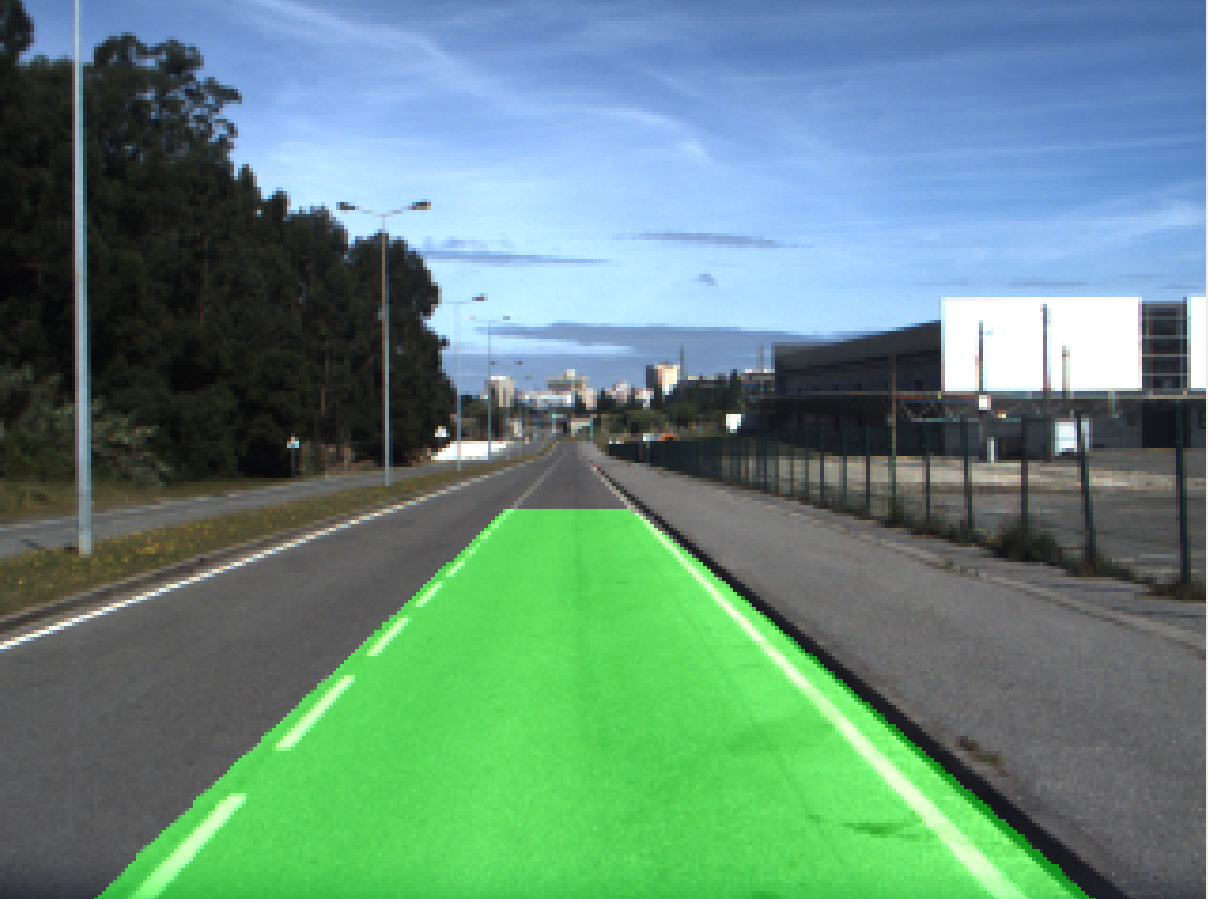
Then, the algorithms used as processors have to be parameterised in order to get the lane lines in the ATLASCAR setup. The first algorithm that was parametrised, was the ROS package implmented and created by me: the advanced_lane_detection package. One of the best results obtained is represented in the image below.