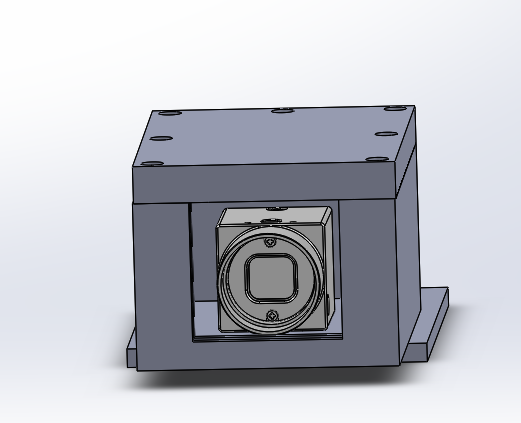
On the first week I modeled a box and a plate (figure below) that will make part of a structure, also composed by an aluminium bar in order to suport the camera on the vehicle.
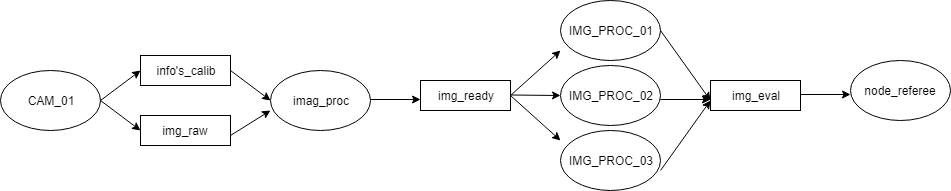
Next I started thinking on the best ROS architecture for this work (figure below). The best architecture is the one that increase the quality of the results and the application robustness. So I will implement more than one algorithm (nodes IMG_PROC) at the same time and then with some kind of evaluation (depends on the algorithms that will be used) detect the lane roads.
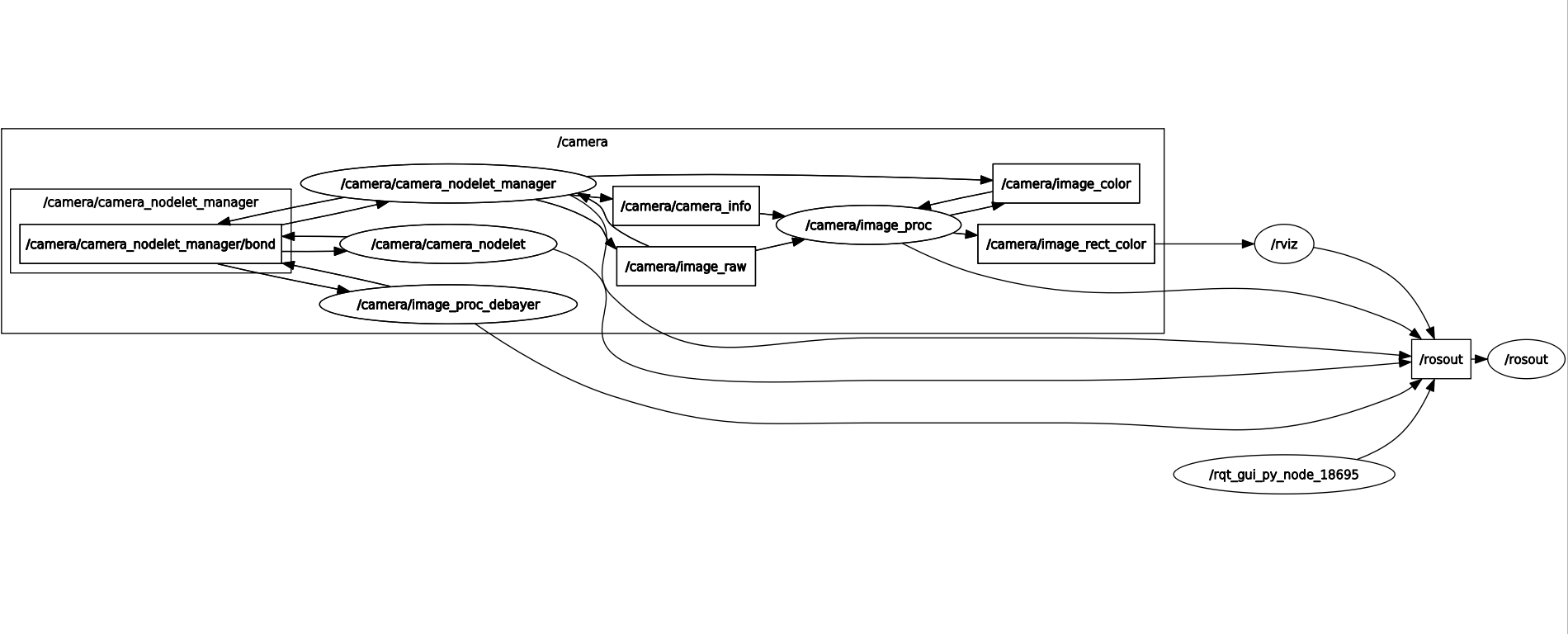
On the second week, I started to make the connection between the camera and the computer and then I did the intrinsic calibration using the ros package camera_calibration in order to get knowing the tools that I will use. This package is a GUI that needs chessboard images to make the intrinsic calibration automatically. The current architecture is represented on the figure below.